虽然摸了一个月,但工作上仍有小小的进展。
一、将数据处理系统化、规范化、自动化
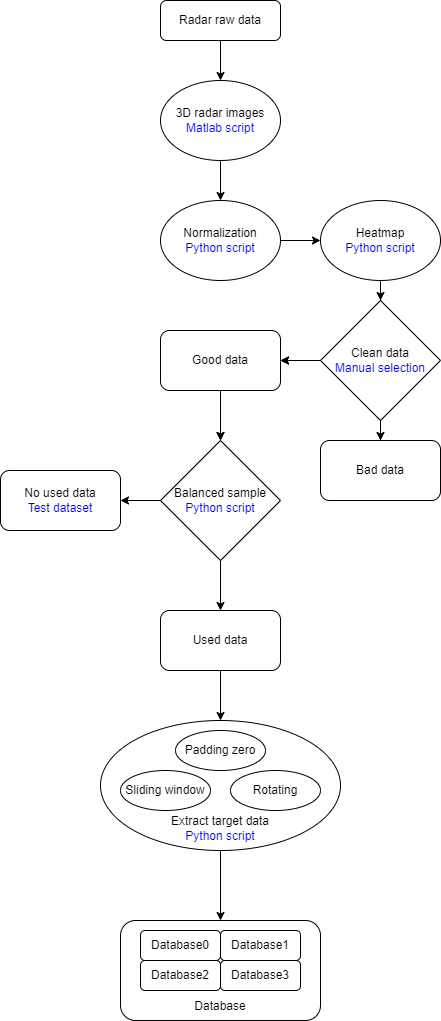
构建完善的数据处理流程,框图如下。虽然部分工作还需要人力参与,但依托Python脚本,数据处理的速度、可靠性、灵活性提升显著。
一点点大问题:
目前可供研究的数据类别不平衡,很多数据性对来说,价值不大,难以充分利用。(木桶效应)

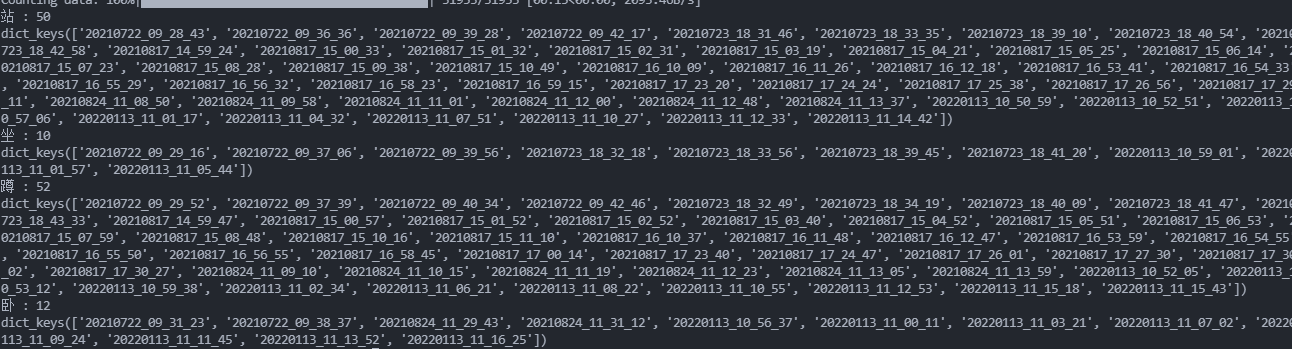
选择比较好的雷达中轴上的数据。很少,只能各用10个。
二、深入认识雷达图像
经过一段时间对雷达图像热力图的分析、识别,在逐一查看完10发10收雷达数据生成的 54,000 多张雷达图像热力图后,加深了对雷达雷达图像的认识,但仍未完全琢磨透。
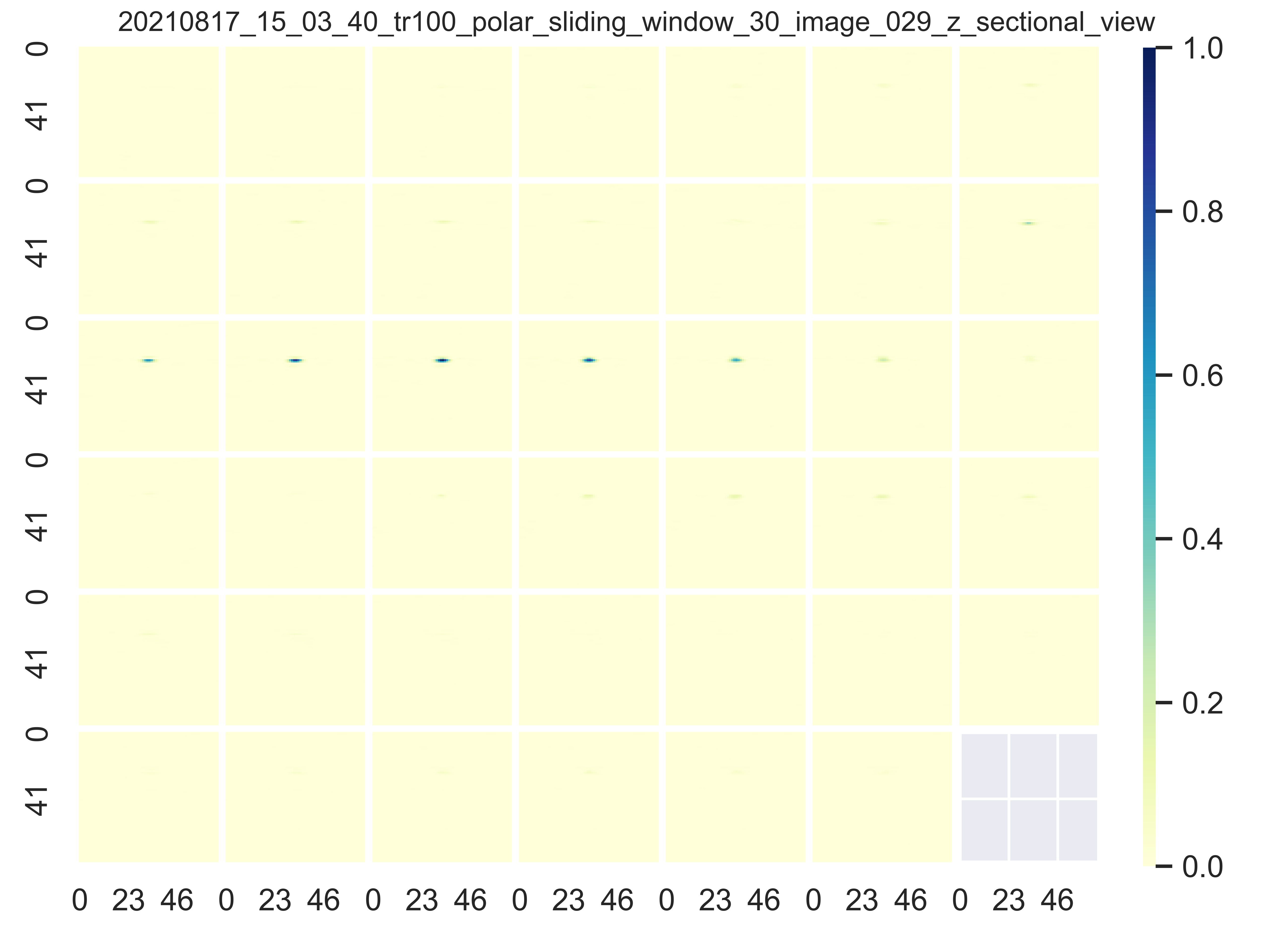
比较理想的雷达图像。
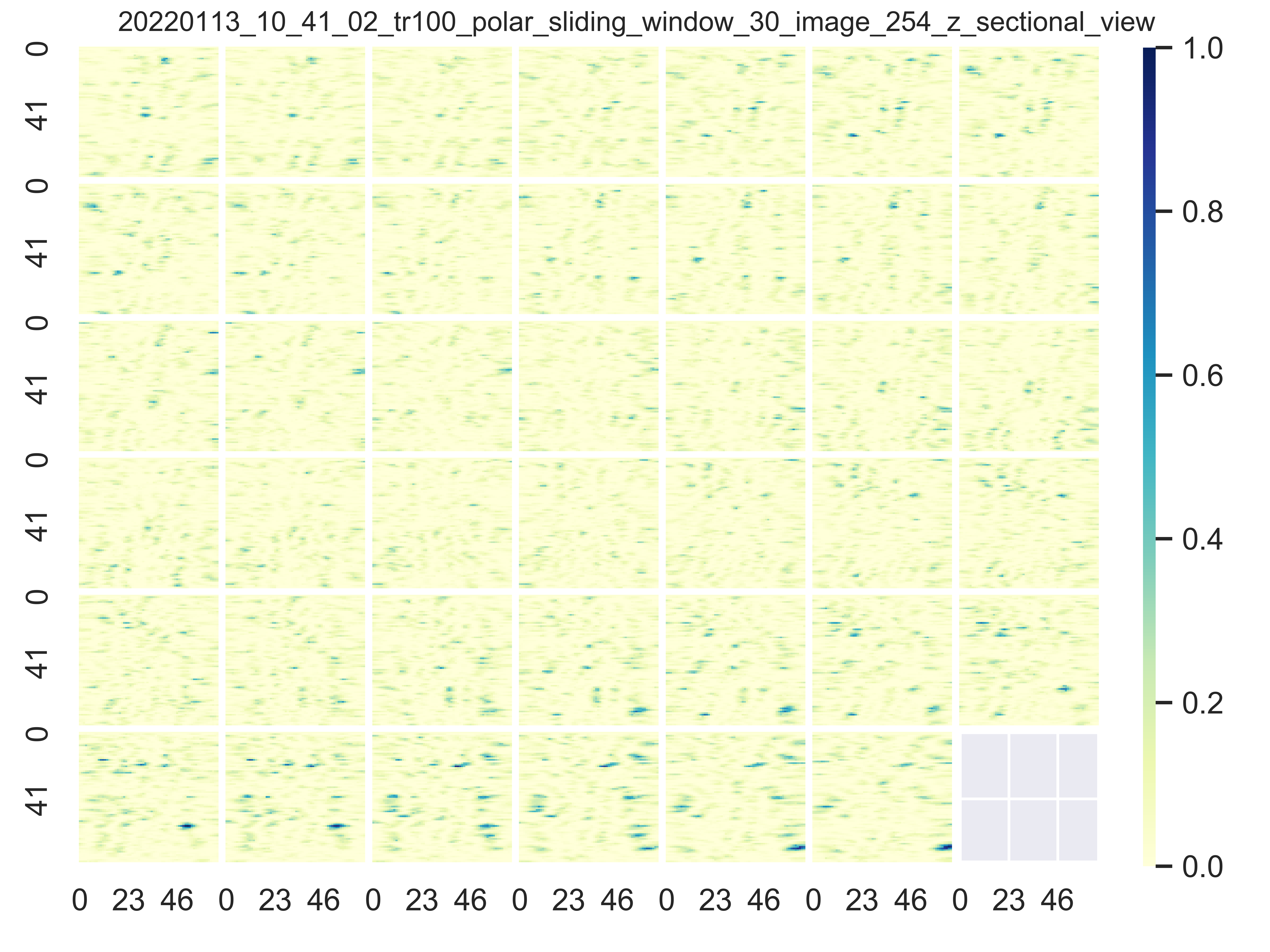
很不理想的雷达图像,卧姿几乎都看不出来。
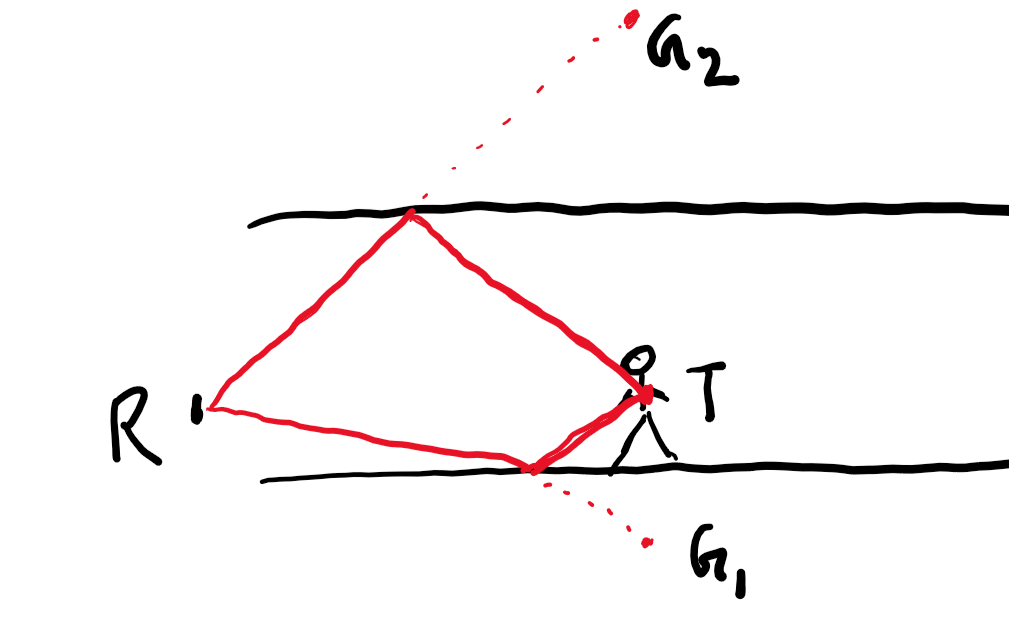
对鬼影的一点个人理解。
三、进行尝试性实验
利用部分数据,基于Resnet18模型,进行目标姿态分类的常识性实验。
结果不乐观,形势很复杂,问题难解决,原因在研究。
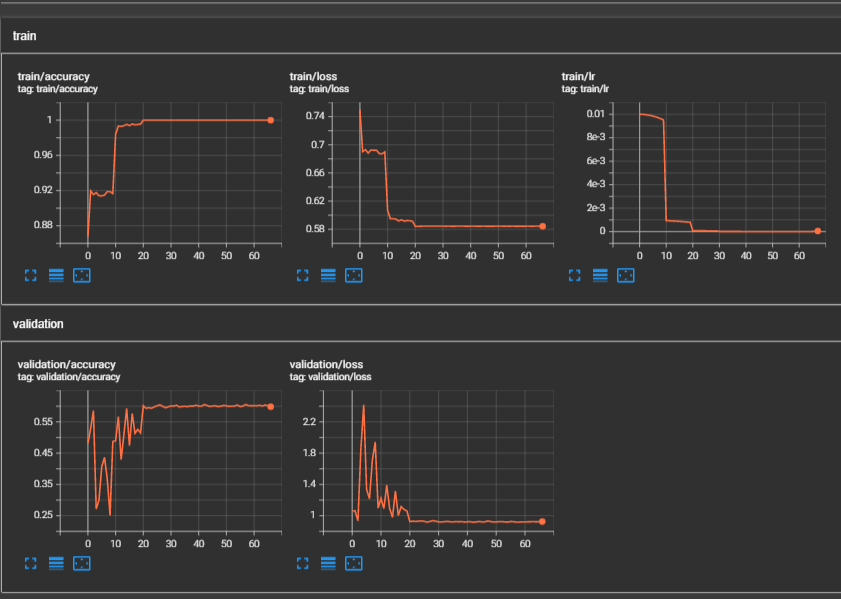
1、每个类别随机抽取20个雷达原始文件,共计4,000帧雷达图像。数据增强后共计 144,000帧。结果如下图所示,开启label smoothing后验证集正确率60%。
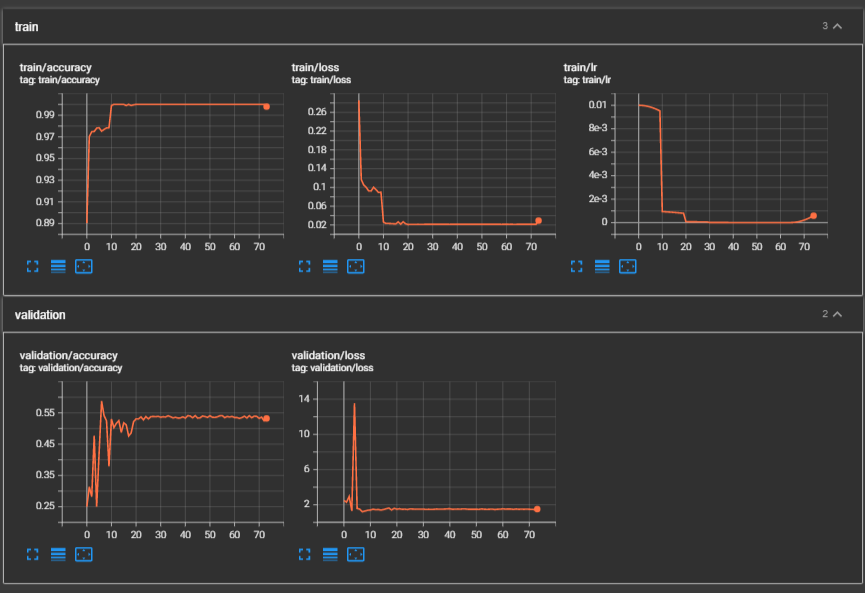
2、从为于雷达中轴线的目标,即目标x坐标为0的数据中,随机抽取10个雷达源文件,生成总计 69,120 帧,结果如下图所示,验证集正确率55%左右。
结果尚未仔细分析,针对调节模型、超参数等内容的实验尚未进行,将会加紧进行下一步工作。
四、会议记录
有需求就提,抓紧时间